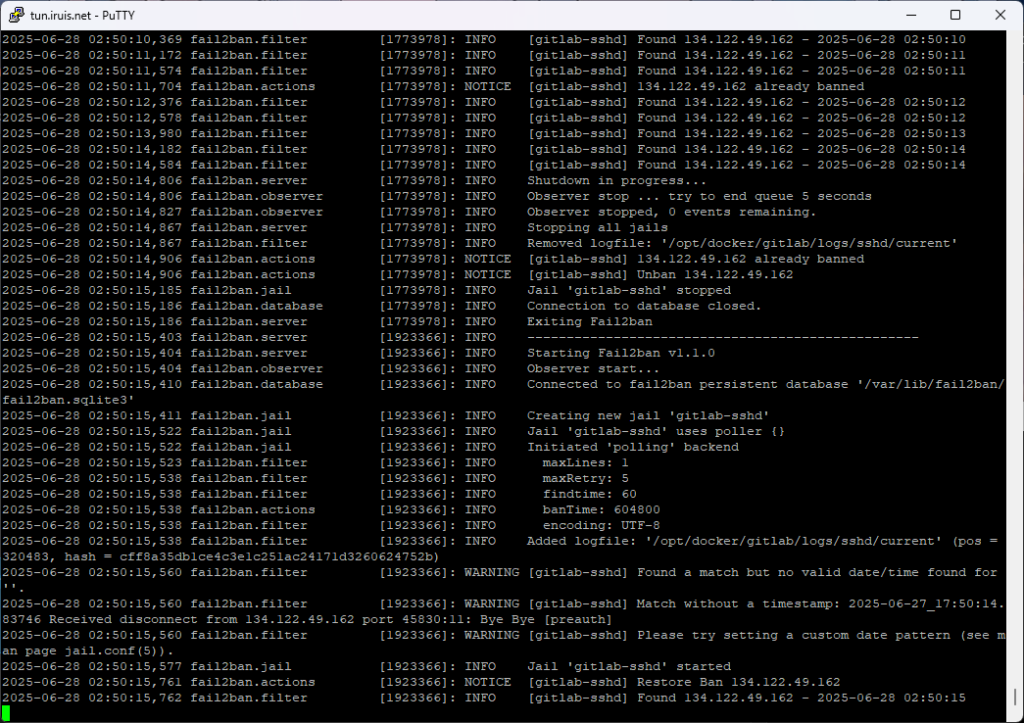
구글 AI가 외곡 된 개요를 보여줄 때도 있지만 종종 도움되는 설명을 해주는 경우도 자주 있다. 몇시간동안 삽질하다가 “docker container reject ip”로 구글링하여 표시된 AI 개요를 바탕으로 ChatGPT에 “fail2ban에서 sudo iptables -I DOCKER-USER -s 1.2.3.4 -j DROP 명령으로 ip를 차단하도록 하려면?”을 입력하여 출력 된 결과를 옮겨적는다.
설정파일 추가 (/etc/fail2ban/action.d/iptables-docker.conf)
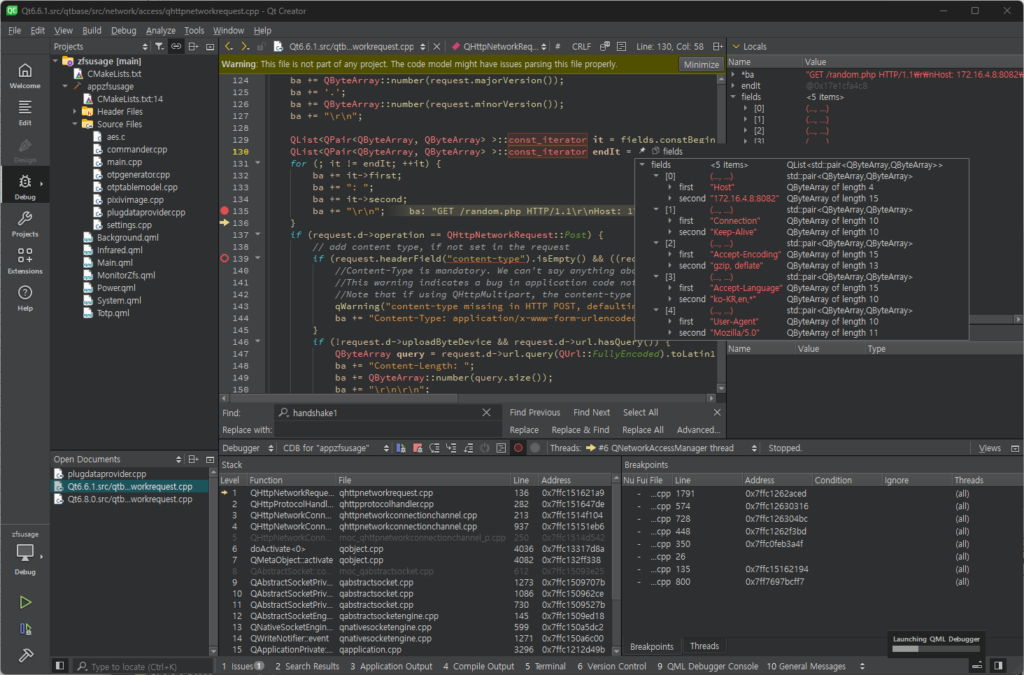
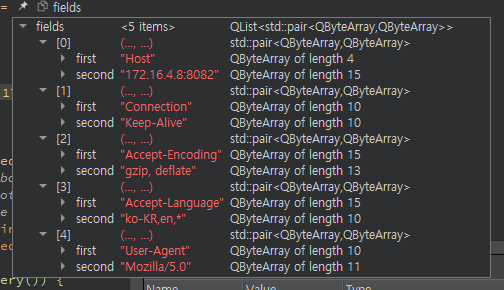
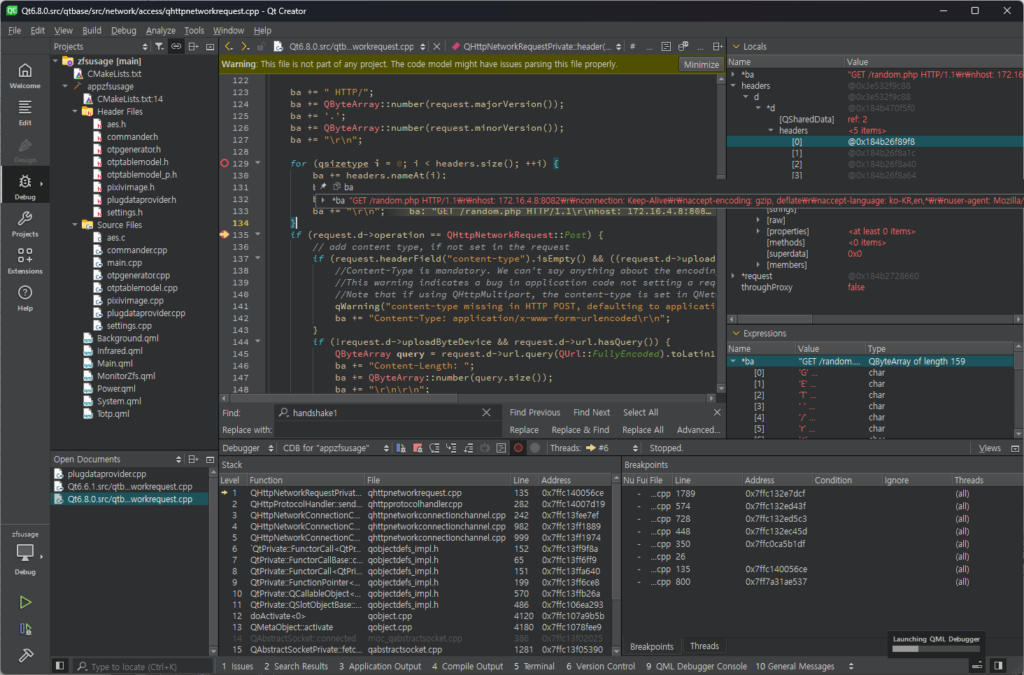
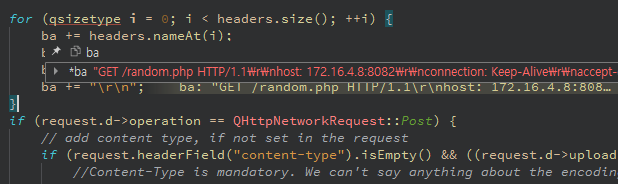
문자열이 아닌 QByteArray여서 그런지 라인피드가 이스케이프되어 표시되는데 보기 편하지 않지만 자세히 보면 6.6버전까지는 단어 첫 글자가 대문자로 시작하지만 6.7버전 부터는 모든 글자가 소문자로 변했다. 보통의 웹서버는 문제가 없지만 간혹 문제가 되는 서버가 있다.
요즘따라 자꾸 뭔가 문제가 발생한다. 트위터 계정이 탈취당하고(고객센터에서 우린 당신이 계정 주인임을 인정할 수 없다. 라는 일괄적인 통보로 고구마 엔딩), 구글 플레이 스토어에서는 공공요금 청구서에 이름 세글자가 정확하게 적혀있지 않다고 신원인증 거절하고(공공요금 청구서는 이름을 개인정보로 취급하므로 세글자를 찍어주지 않음. 즉 불가능한 방법을 구글에서 요구), 이번엔 하드 증설로 윈도우 새로 설치했다가 정품인증이 안되어 반나절 날려먹었다.
결론은 허무하게 인증되었다.
스크린샷은 남아있지 않지만 발생한 오류코드는 0x803F700F로 메시지 내용은 아래의 노란색 글자와같았다. (출처: MS포럼)
윈도우 11은 붉은화면이 아니라 그냥 제어판에서 노란색 글자가 표기되고 문제 해결을 누르면 아래처럼 처럼 “해결을 완료”하였다면서 “정품 인증할 수 없습니다”라는 역설적인 내용의 화면이 뜨게된다.
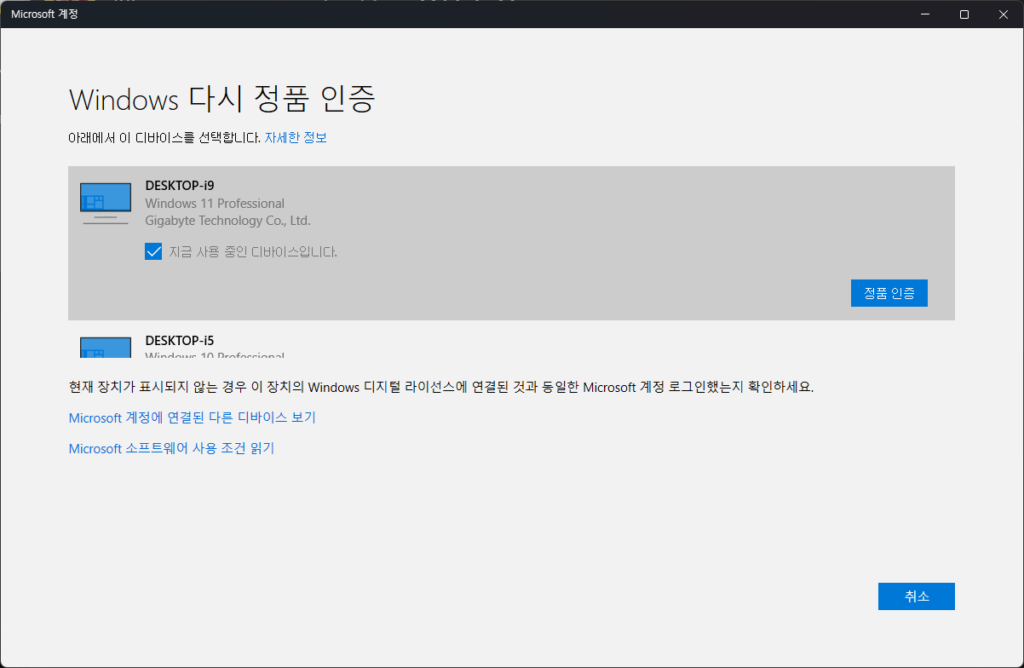
이번엔 새로운 하드에 설치를 할 겸 바이오스도 업데이트를 함께 하였는데 정품인증이 안되었다는 메시지가 떠서 이미 오래 전에 겪었던대로 “최근에 이 디바이스의 하드웨어를 변경했습니다.”를 클릭하여 기존 인등되었던 PC를 선택하여 다음을 눌렀다.
하지만 뜨는 메시지는 아래와같았다
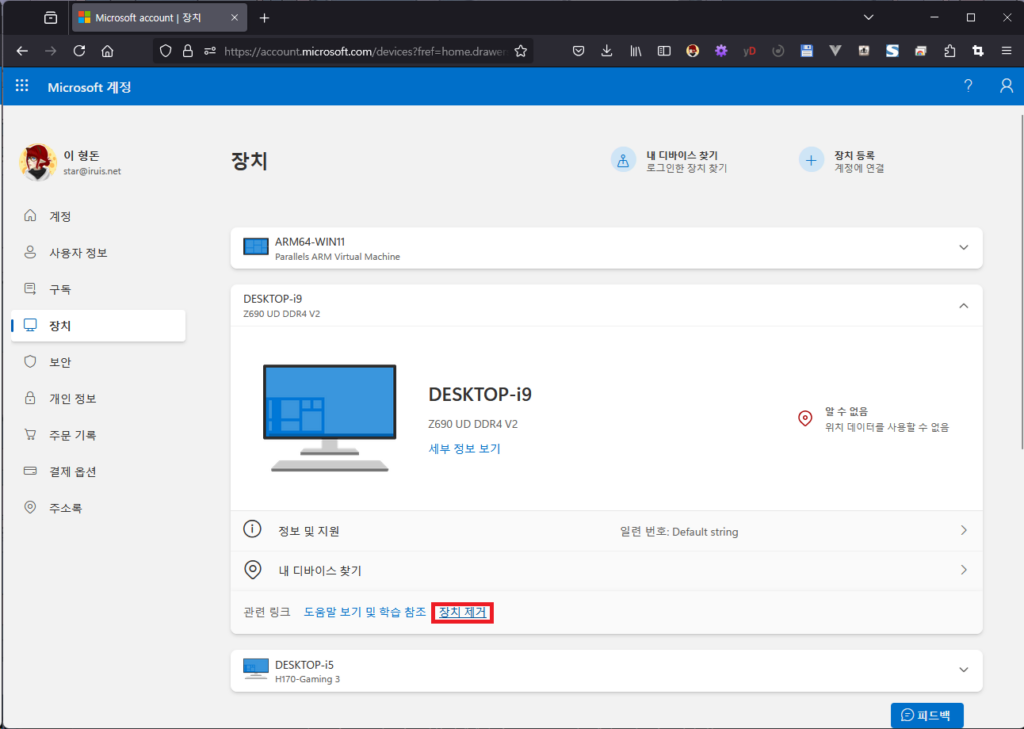
이것때문에 거의 네시간 넘게 구글링하고 다시 시도하는것을 반복했는데… 마지막으로 거의 자포자기식으로 MS 계정 장치 페이지에서 현재 사용중인 윈도우를 제외하고 다 지워버렸다.
그 후에도 정품인증이 안되어 다시 “최근에 이 디바이스의 하드웨어를 변경했습니다.”를 클릭하니 DESKTOP-i9는 사라져있고 오래 전 QEMU에서 KVM가속환경에서 인증을 한적 있던것이 DESKTOP-i5와 함께 남아있길레 그거로 선택하여 확인하니까 정품인증이 완료되었다는 메시지가 떴다.
결론은 아래 화면에서 장치이름이 포맷 직전에 사용중이였던 장치와 전혀 다른 장치로 선택해야 인증이 되는 경우가 있다는 것이고 인증이 완료되었어도 디바이스 정보가 실제와 다를 수 있다는것이 이번에 겪으면서 느낀 결론이다. (자포자기 식으로 선택했기때문에 안타깝게도 선택하기 전 장치 이름을 남기지 못했다. 내용은 DESKTOP-렌덤문자, Windows Professional, QEMU였다.)
혹시라도 방금 전 포맷한 장치가 맞는데 선택하여 인증을 하려해도 인증이 안된다면 엉뚱한 이름으로 등록 된 장치가 있을 경우 그걸 선택하여 정품 인증을 진행 해보자.
올해는 더이상 이상한거로 스트레스좀 안받았으면 좋겠다.
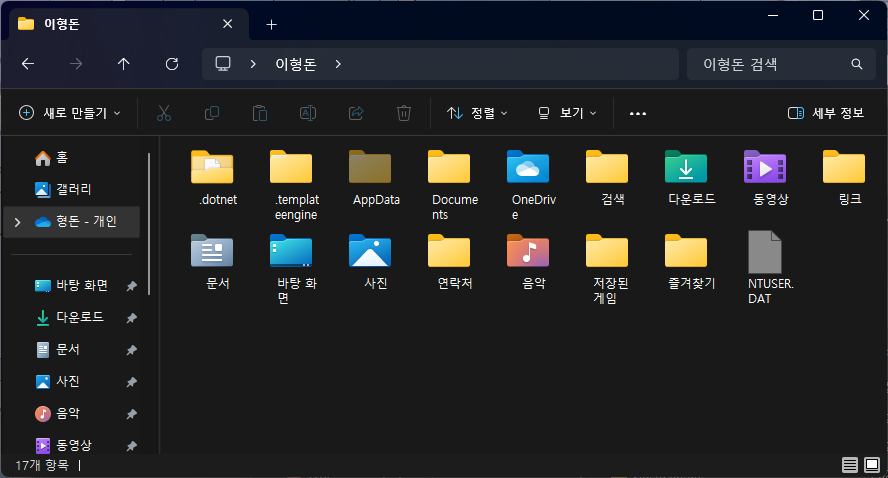
그나저나 24H2로 새로 설치해도 내 MS 계정은 홈 폴더의 폴더 레이블이 저따구로 표시되는구나. 대체 왜 내 계정만 저런거냐.