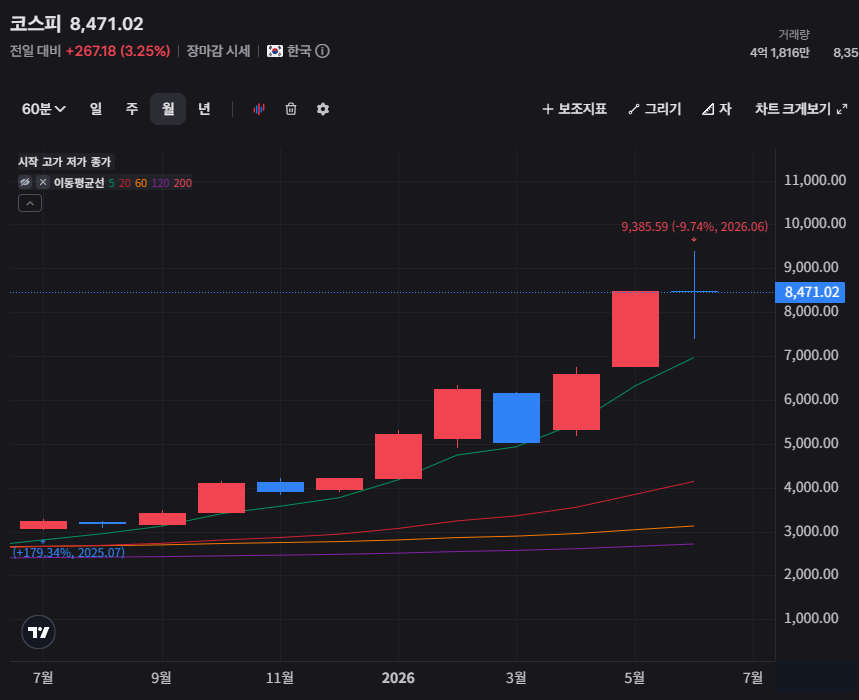
오늘은 연금저축펀드를 시작한지 160일. 20일 사이 5월달 지수까지 밀려내려갔다.

여기에서 더 파괴적인것은 오전 1시 현재 코스피 야간선물이 -5% ~ -6%를 넘나든다는 것.

아래와같이 반도체 지수가 하락하고 있기 때문인 듯 하다.

이미 많이 떨어졌는데 얼마나 더 떨어질 지 무섭긴 하다. 그래도 금융위기 때 40%가 하락한 대폭락 보다는 나은 상황이지만.
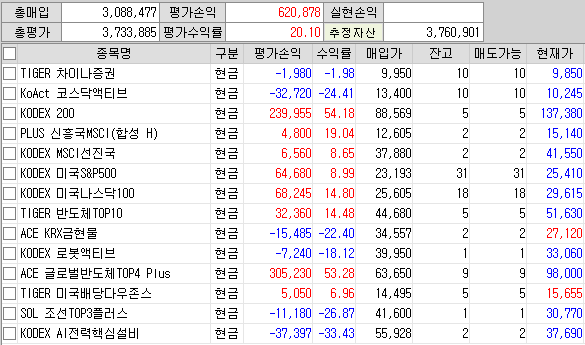
암튼 서두는 이정도로 하고 오늘의 연금저축펀드 상황은 아래와같다.
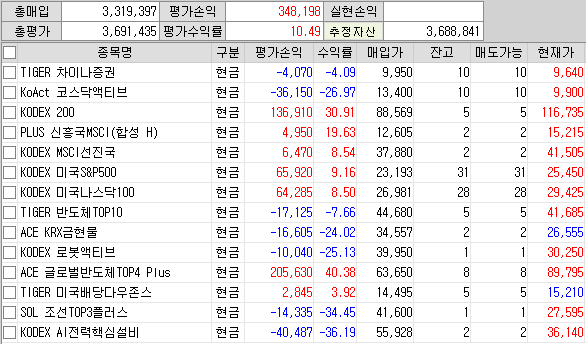
평가수익률이 반토막 되었다. ACE 글로벌반도체TOP4 Plus를 1주 팔고 미국나스닥100을 10주 늘린것도 한 몫 했을 것이다. 이번달은 나스닥100만 매수했지만 다음달은 S&P500도 추가매수 해야겠다.
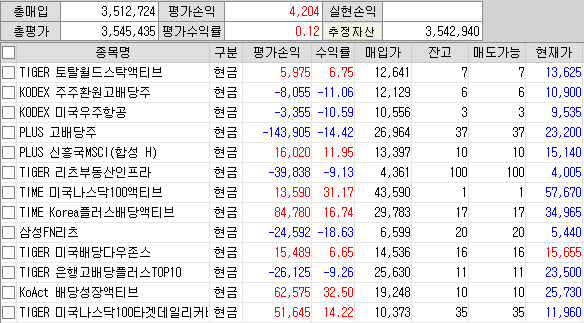
아래는 ISA 계좌상태.
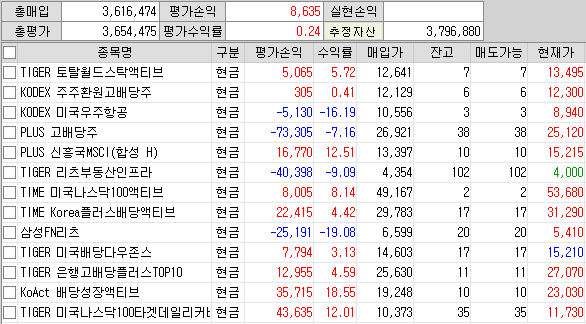
PLUS 고배당주와 TIME 미국나스닥100액티브, 미국배당다우존스를 1주씩 추가매수한 것 외 추가 매수는 없다. 단, 4일 후 고배당주와 리츠부동산인프라의 자동매수가 실행 될 예정이다.
마지막으로 펀드만 운영하는 미래에셋증권의 연금저축펀드 상태.


코스피 급락에 큰 영향을 받았다. 지수가 2개월 전으로 밀려났고 3개월 전 계좌를 만들고 매달 5~10만원씩 추가매수했으니 당연한 결과인 듯 하다. 그나마 첫번째 미래에셋 계좌의 필승코리아 펀드 비중을 55%에서 45% 비중 되도록 펀드를 추가매수 했기 때문에 마이너스가 안된거같다. 하지만 필라델피아 반도체 지수가 4%넘게 하락중이니 여기에서 더 마이너스가 될 듯 하다.
CMA 계좌는 최근 TIGER 200타겟위클리커버드콜을 소소하게 모으는 중인데. 1년동안 상승율이 KODEX 200타겟위클리커버드콜과 10%정도 밖에 차이가 안나면서 배당금은 절반도 안되는걸 보면 TIGER 200타겟위클리커버드콜의 장점인 코스피 상승률을 더 가지고 가지도 못하면서 분배금도 낮은것으로 보인다. 내일 KODEX로 갈아타는게 더 나을 듯 하다.
과연 20일 후 코스피 지수가 어떻게 되어있을까. 단일종목 레버리지는 얼마나 더 망가질까. 궁금해진다.
덧) 야간선물이 하락했고 반도체 지수도 하락해서 예상은 했지만 역시나였다.

그래도 추가 하락 없이 끝나긴 했다.